
Introduction to Automotive Standards
As the automotive industry accelerates towards an autonomous future, mechanical functions are being replaced by electronics. Innovations in automotive safety, Advanced Driver-Assistance Systems (ADAS), in-vehicle infotainment, and autonomous driving systems are driving exponential growth in the number of automotive sensors; for example, the number of high-resolution cameras is expected to increase from 5 to 20, and the number of displays from 3 to 15, in this decade.
Advanced sensors like Light Detection and Ranging (LiDAR), that support level 4 and level 5 autonomous driving, require reliable, high-performance, safe, and secure connections to displays and processors.
Any new automotive standard must meet these key requirements:
- Bidirectional communication (low throughput control signals and high throughput data from sensors)
- Power delivery to end-points (sensors)
- High-reliability/low-error rate
- Electro Magnetic Compatibility (EMC) immunity
These requirements create new expectations for automotive SerDes receiver (Rx) designs which must be tested in the complicated automotive noise environment. In this paper, we’ll investigate the sources of noise, how they’re defined by either their spectral densities or time evolutions, and how they can be emulated and combined for receiver testing in the lab.
Automotive Ethernet
Automotive Ethernet is replacing for legacy In-Vehicle Network (IVN) technologies; most autos today are equipped with 100BASE-T1 (100 Mbps). Different original equipment manufacturers use it for different reasons; for example, Hyundai for Infotainment systems, and Volkswagen for ADAS connectivity. In 2019 and 2020, the standard added both lower (10 Mbps) and multigigabit speeds. The latest standard, IEEE 802.3ch for data rates of 2.5, 5, and 10 Gigabits per second (Gb/s), was completed in early 2020. Later that year, IEEE 802.3cy began development of an automotive PHY for 25, 50, and 100 Gb/s.
MIPI A-PHY
The MIPI Alliance released the A-PHY v1.0 automotive SerDes PHY specification, in September 2020 which was adopted by IEEE as IEEE 2977 in July 2021.1,2 The spec allows for asymmetric data in point-to-point or daisy-chain topology, with optional power delivery. Data rate equals 16 Gb/s on the downlink; Ultra-low packet error rate of 10-19 and long reach of about 15 meters. Version 1.1, released January 2022, doubles the maximum available downlink data rate from 16 Gb/s to 32 Gb/s.3
ASA Motion Link (ASA ML)
Another IVN standard, the Automotive SerDes Alliance (ASA), began work in 2019 for SerDes standardization to expand the ecosystem beyond proprietary SerDes solutions.4 The new Standard supports bandwidths up to 16 Gb/s over up to 15 meters, with robust EMC immunity, electromagnetic interference emission profiles and support for application stream encapsulation protocol for Video, I2C, and Ethernet packets.
Sources of Signal Degradation in the Automotive Environment
ASA and A-PHY set limits on channel performance, including Media Dependent Interface (MDI), insertion loss (IL), return loss, MDI IL, and crosstalk, as well as EMC. Compliant SerDes are expected to function with channels that meet these requirements. The automotive environment has many unique electromagnetic disturbances like ignition of an internal combustion engine, power generators, noise from automotive electronics, etc. Both A-PHY and ASA ML have noise environment definitions for EMC.5,6
Narrow Band Interference (NBI)
A-PHY defines the Radio Frequency Ingress (RFI) based on the Absorber Lined Shielded Enclosure method ISO 11452-2 and Bulk Current Injection (BCI) based on ISO 11452-4, with different limits for Profile 1 (P1) and Profile 2 (P2).6,7,8

Fast Transients
ASA ML and A-PHY both define fast transients based on ISO 7637-2/3.6,9,10

Broadband Noise Defined by PSD
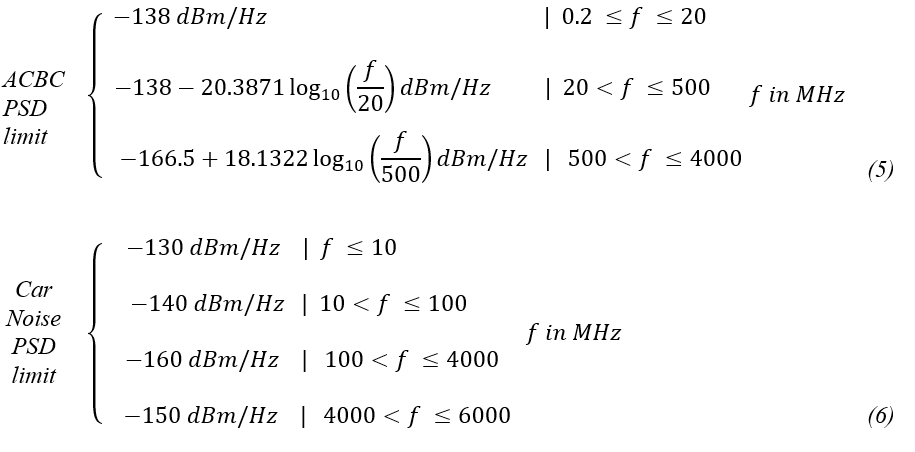
Based on work published by Daimler AG, MIPI A-PHY also includes environmental noise called “car noise” and noise introduced by alien cable bundle crosstalk (ACBC).11
Testing automotive SerDes receivers is particularly challenging because the test apparatus must accurately recreate the signal, the worst-case compliant channel (up to 15 meters long), and all of the peculiar noise impairments.
Stressed Receiver Testing
The importance of receiver testing in serial communication systems was recognized long ago. What started as a design tool has evolved into an essential method for ensuring the reliability of digital communications. With increasing data rates, the eye at the receiver became narrower and, finally, closed. To compensate for the degraded signal, more features were added to the receiver; equalization, clock data recovery, and decoding, to name a few. As receiver complexity increased so has the complexity of receiver testing.12
Strategies for Receiver Testing
Receiver testing requires a reliable data source that can generate standard compliant data. It can be a high-performance transmitter, the signal generator component of a Bit Error Ratio Tester (BERT), an Arbitrary Waveform Generator (AWG), or a combination of the two.13
Strategy A: Test Equipment as Data Source
The most common approach is to use test equipment (TE), such as a BERT or AWG, as a data source. Since TE usually offers control over the signal data and injection of impairments, this approach doesn’t require too many changes when test complexity grows as a specification develops.
TE makes calibration straightforward, if not easy. With the help of mathematics, fixture design, and data signal manipulation, we can calibrate a worst-case signal at the test point. Since BERTs, AWGs, and the like don’t operate above the PHY layer, link negotiation, which requires some protocol awareness requires a side channel, like an I2C bus that can be included in the test mode for the receiver.
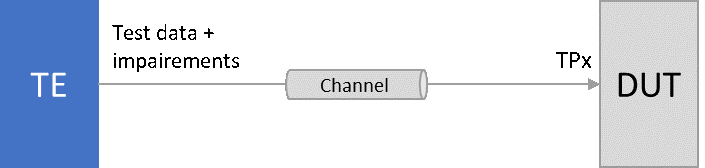 Figure 1. Generic test setup for Strategy A. Test equipment can be a signal generator like the BERT or an AWG. Channel represents the physical medium as specified in the specification.
Figure 1. Generic test setup for Strategy A. Test equipment can be a signal generator like the BERT or an AWG. Channel represents the physical medium as specified in the specification.
Strategy B: Link Partner (Golden Tx) as a Data Source
An approach that has gained traction in the automotive standards like AE and A-PHY, uses a "golden transmitter" as the signal source. The golden Tx is a standard compliant serializer that communicates with the device under test (DUT) and is capable of active link negotiation. With this strategy, TE controls the Tx—it can set the Tx in a specific mode, read/write to certain registers, etc.—and can inject additional impairments, like wideband noise, into the signal prior to transmission into the channel.
Since receiver testing depends on a precisely tuned signal that includes specific levels of noise, accurate calibration of the Golden Tx is crucial. Not only must the signal (and channel) be compliant with the specification, but the intrinsic impairments—noise and jitter—must be well understood so that the correct levels of added impairments can be added to yield the correct stressed test signal.

Figure 2. Generic test setup for Strategy B. The Tx is responsible for protocol and data handling. TE introduces impairments onto the channel. Such a setup requires additional considerations for the fixture used to inject impairments.
Emulation of Noise Signals
Emulation of the various noise profiles as described through Equations 1-6 requires an instrument with a sufficiently low noise floor capable of generating signals over a large dynamic range. Modern high-performance AWGs provide great fidelity, high resolution, and wide bandwidth. AWGs have the potential to generate any signal, the ideal choice for generating the complex combination of impairments required by automotive SerDes standards. The difficulty arises in generating the desired signal within the constraints of the AWG: sampling rate, memory depth, and Digital to Analog Conversion (DAC) resolution specifications of the AWG of choice.
Automotive Broadband Noise
Spectral Density
Fourier transforms allow us to move between the frequency and time domain of a signal. The Fast Fourier Transform (FFT) is its digital form. Performing an FFT requires application of a windowing function to enforce the periodicity of the signal. Unfortunately, applying a window spreads signal energy from each FFT bin into adjacent bins, effectively increasing the FFT bin width (∆f). The relative increase in bin width is characterized by the equivalent noise bandwidth (ENBW). Each window has a specific ENBW that must be accounted for when scaling the FFT spectrum. For example, the ENBW of the Hann window is 1.5. If no window is applied (so-called Rectangular window), ENBW = 1.0.14
The Power Spectral Density (PSD) gives the power of a signal per unit frequency (W/Hz or dBm/Hz). It can be derived by correcting the FFT auto-spectrum by its ENBW. The PSD at a particular FFT bin number j is given by:

Generating Noise With an AWG
Generating white noise with an AWG is tricky business. White noise is a random signal with a flat PSD.15 In discrete form, a white noise signal is a series of independent samples generated from the same probability distribution function. We can generate a white gaussian noise signal (WGN) using a random number generator that follows a given Gaussian distribution.16 Since AWGs require sampled waveforms loaded into memory, we have two problems:
- A “random” signal transmitted by an AWG is actually pseudo-random.
- Since AWGs have limited memory, the waveform will be looped over.
The first problem can be approached by using an approximation of a random process with a sufficiently indeterministic seed number.
The trick to solving the second problem is to create a waveform long enough that the playtime appears infinite within the context of the measurement. The following simulations show a white gaussian noise sample generated with 2*1024*1024 uniformly distributed random samples. Pseudo-random number sampling techniques like Box-Muller can be used to achieve a normal distribution.
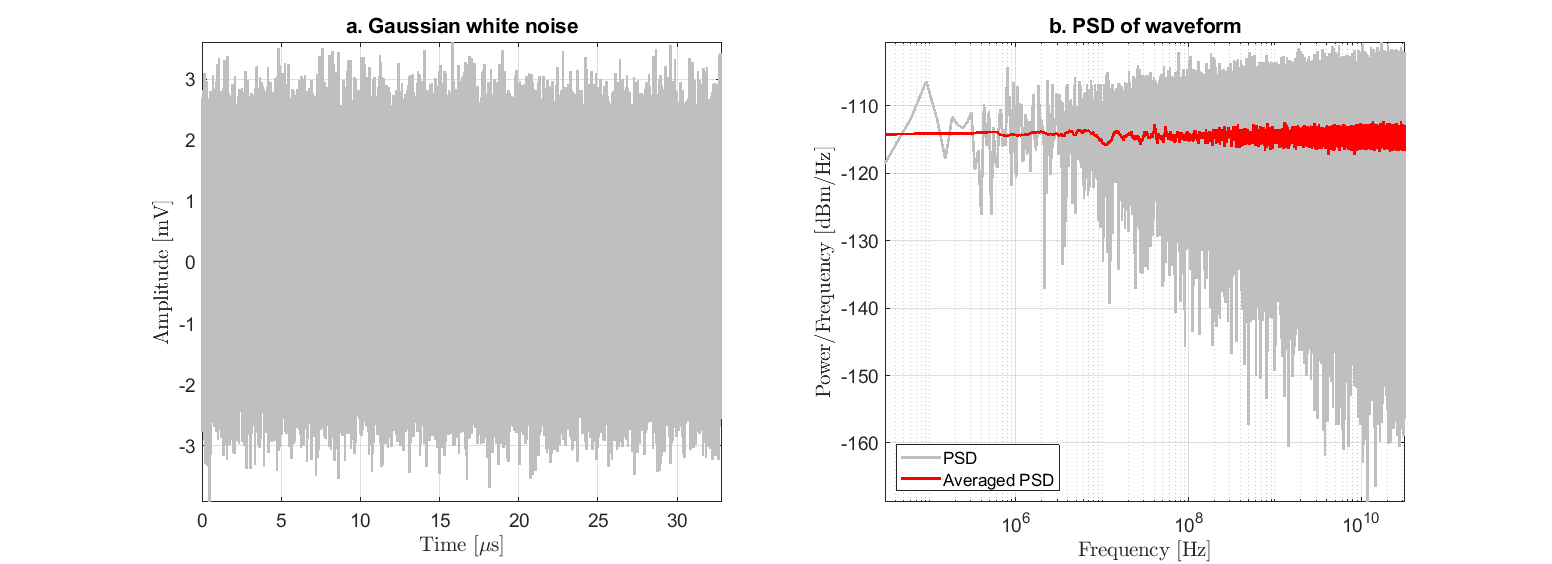 Figure 3. Constant PSD of white gaussian noise comprised of 2*1024*1024 samples.
Figure 3. Constant PSD of white gaussian noise comprised of 2*1024*1024 samples.Generating PSD-Defined Noise
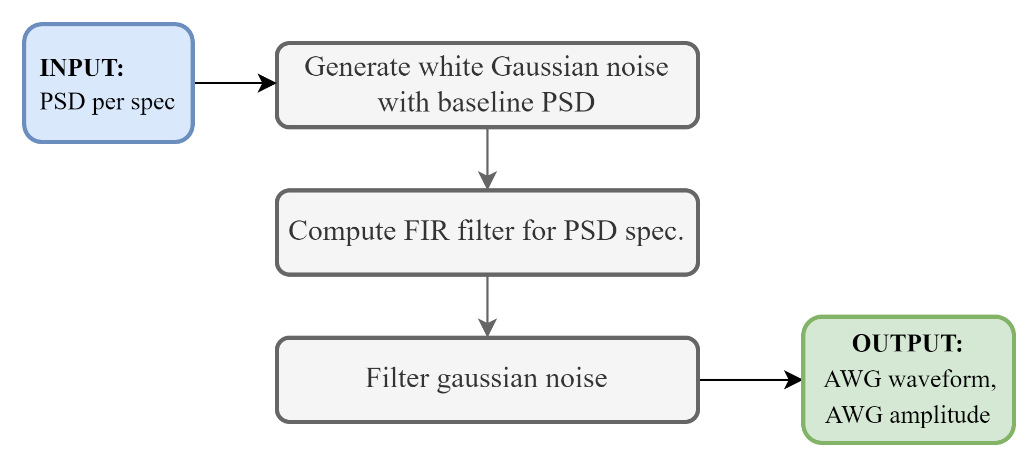 Figure 4. Sequence of steps to generate an AWG noise waveform with a specified PSD.
Figure 4. Sequence of steps to generate an AWG noise waveform with a specified PSD. ACBC and car noise are both defined in terms of their spectra. In theory, to generate a signal for a given PSD mask, we use this simple algorithm:
- Generate white noise, that is, a constant PSD for all frequencies, with the generator amplitude set to the base level PSD.
- Create a FIR filter that, when applied to white noise, reproduces the desired PSD spectrum.
- Apply the filter to the white noise.
 Figure 5. (a) FIR filter computed for the ACBC and Car noise profiles of the MIPI A-PHY spec. (b, c) the PSD of the waveforms generated by filtering waveform in Figure 3 using the filters in (a).
Figure 5. (a) FIR filter computed for the ACBC and Car noise profiles of the MIPI A-PHY spec. (b, c) the PSD of the waveforms generated by filtering waveform in Figure 3 using the filters in (a). EMI (RFI and BCI)
AWGs can generate IF/RF frequency from a mathematically defined waveform. Generating an RF signal depends on two main factors: AWG sampling frequency, fs, and AWG waveform length L. For an RF signal of frequency f, samples of the waveform, S(i), are given by

Where, the sampling ratio is Sr = fs/f, and the index, i, is in within the range [0 … L].
Fixed-length AWG waveform memory segments can be configured to repeat continuously, provided that the there is no discontinuity between the first and last waveform samples. In the above equation, generation of a continuous sine wave can be assured by appropriate choice of the waveform length, L, and sampling frequency, fs, within the constraints that (1) fs is bound by the AWG’s maximum and minimum sampling frequencies, fmin < fs < fmax; and (2) L must be and integer multiple of the AWG memory segment granularity.17,18
Another complication comes from the requirement that RFI and BCI impairments for automotive Rx tests sweep in frequency. AWGs generate frequency sweeps through the dynamic sequencing feature in which the waveforms for each frequency are stored in separate memory segments. The sequence of frequencies in each segment can then be transmitted in the order defined by the user. However, there is a constraint: the segments must all have the same sampling frequency.18 Hence, careful consideration is required when choosing a sampling frequency that can best accommodate the sine wave frequencies in the sweep.
The constraints of AWG memory granularity and sampling frequency may require modification of the individual sweep frequencies to generate an optimal test signal.
In practice, AWGs don’t generate perfect sinusoidal signals, even at frequencies that perfectly fit the constraints. Like any other signal generator, AWG signals are impaired by intrinsic equipment noise and distortion, but AWG signals also suffer from quantization noise caused by the DAC resolution. For an 8-bit DAC the signal to quantization noise power is about 50 dB.17
 Figure 6. Frequency response of a multi-frequency (0.1,0.2,0.5,1,2,3,4,5,10 GHz) RF signal. Harmonics due to sampling frequency, loop frequency, and non-linear distortions can be seen prominently in the higher frequencies, but still with an isolation > -40 dBm.
Figure 6. Frequency response of a multi-frequency (0.1,0.2,0.5,1,2,3,4,5,10 GHz) RF signal. Harmonics due to sampling frequency, loop frequency, and non-linear distortions can be seen prominently in the higher frequencies, but still with an isolation > -40 dBm.Generating Compliant Noise Signals
Stressed receiver tolerance tests usually require a combination of broadband noise sources and narrowband interference sources. Combining all signal impairments on an AWG presents a unique challenge to generation of a fully compliant signal. The AWG’s DAC resolution and finite waveform memory are the primary issues that affect the quality of the transmitted signal.
Effects of Digitization
AWGs have finite DAC resolution that sets the minimum ‘amplitude step’ of a signal. For example, an 8-bit DAC has 256 discrete "voltage steps" between the minimum and maximum voltage level. This N-bit resolution means that the signal voltage will be the nearest available step, instead of the desired value. Counterintuitively, this DAC resolution also affects the frequency resolution of broadband noise signals.17 To illustrate this, in Figure 7 we combine ACBC and Fast Transient Noise into a complex noise signal with both 6- and 8-bit DAC resolution and compare to the ideal – you can see how decreasing DAC resolutions degrades the signal PSD.
Figure 7 also shows that, for 8-bit resolution, we lose PSD precision above 250 MHz. The problem comes from combining separate noise sources that have different amplitude ranges, though each noise source can be reliably generated separately with an 8-bit DAC.
 Figure 7. Comparison of a complex noise signal combining low amplitude broadband noise and high amplitude fast transient noise simulated with different DAC resolutions.
Figure 7. Comparison of a complex noise signal combining low amplitude broadband noise and high amplitude fast transient noise simulated with different DAC resolutions.AWG Memory Constraints
AWG memory depth limits the total number of waveform samples.17 The more samples, the more faithful the signal is to the waveform. The effect is pronounced at lower frequencies. In Figure 8, we combine ACBC noise, which is defined by its PSD from 0.2 MHz to 4 GHz, and Car Noise, defined by PSD from 0.2 MHz to 6 GHz. Reducing the waveform length from 2*1024*1024 samples to 128*1024 samples flattens the sharper ‘dips’ in PSD at frequencies of 10 MHz and 100 MHz. Since we are sampling at 64 GSa/s, the lowest frequency that can be resolved with 128*1024 samples is > 1 MHz. At 10 MHz we cannot match the sharper transitions of the PSD profile since there simply aren’t enough samples to properly define the lower frequency content of the waveform.
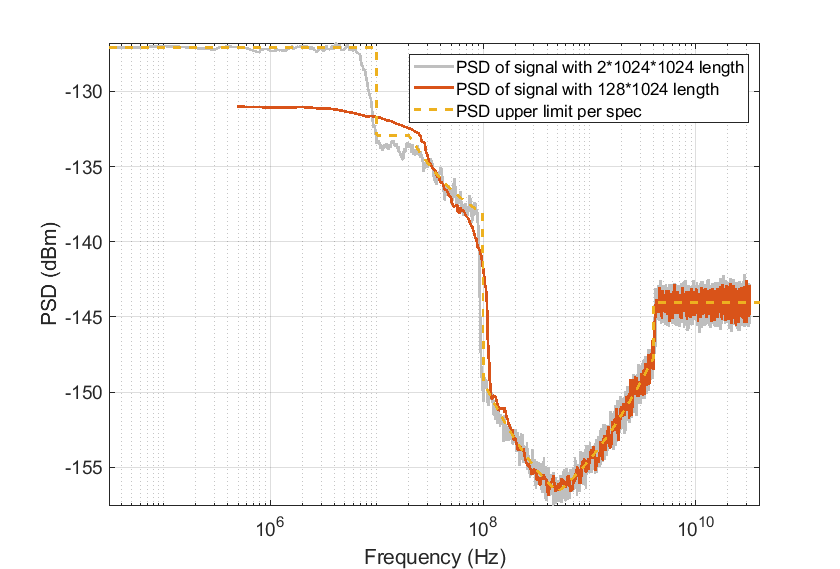 Figure 8. A combination of complex noises defined by MIPI A-PHY specification 1.0, Chapters 7.4-7.5. And the effects of waveform length.
Figure 8. A combination of complex noises defined by MIPI A-PHY specification 1.0, Chapters 7.4-7.5. And the effects of waveform length.Relatively simple waveforms, like RF signals, can also be affected by the length of the stored waveform and the choice of sampling frequency, Figure 9. The waveform doesn’t have enough samples to smoothly define the lower frequencies or the transitions between frequencies.
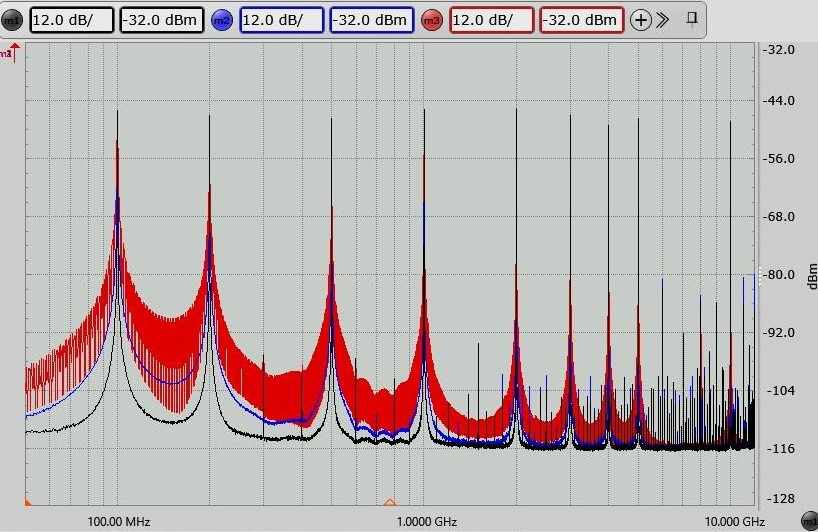 Figure 9. Frequency response of a multi-frequency (0.1,0.2,0.5,1,2,3,4,5,10 GHz) RF signal with different waveform length. The black, blue and red traces show the spectrums for waveforms with length 57600k, 5760k and 576k respectively
Figure 9. Frequency response of a multi-frequency (0.1,0.2,0.5,1,2,3,4,5,10 GHz) RF signal with different waveform length. The black, blue and red traces show the spectrums for waveforms with length 57600k, 5760k and 576k respectivelyRx Test Design Considerations
Test Fixture Design
We’ve seen that combining complicated noise sources can be difficult, but we also have to combine the noise to complicated signals.
MIPI A-PHY, for example, uses 16-level Pulse Amplitude Modulation (PAM16) at 4GBd and requires the receiver to tolerate:
- PSD-defined ACBC and car noise
- High-amplitude FT noise
- Band-limited RFI and BCI
The problem is that the data signal amplitude is 500 mV, while the FT noise amplitude is 250 mV and the broadband noise amplitudes are about 5 mV. If 4 bits of vertical resolution are assigned to broadband noise (the minimum resolution for a reasonable quality spectrum), then to achieve the necessary dynamic range to generate the signal with noise is 12 bits. This DAC resolution is beyond the capability of any existing high-speed deep-memory AWG.

Figure 10. Without fixture (direct connection of generator to the oscilloscope) it is not possible to generate a combination of broadband and FT noises, since the high amplitude of the FT (top) consumes the whole dynamic range of an 8-bit AWG, resulting in a very coarse-grained noise (bottom, cf. the red line, representing the real digitized signal to the blue line representing "ideal“ signal: the characteristic shape of the ACBC PSD at 0.5-1GHz is totally distorted).
There are two ways to resolve this issue:
- Use different signal generators (or channels of a single generator) for different sources of noise and combine them.
- Amplify the frequencies of the first 5 harmonics of FT noise (40 to 200 MHz) where most of the power is concentrated. This way, we can reduce the amplitudes of these frequencies at the generator and prevent FT from consuming the whole dynamic range.
We used an RF pick-off tee to combine two broadband signals without introducing distortions. The pick-off tee consists of two 50 Ω lines – the through line and the coupled line. The through line is connected to the coupled line through a 250 Ω resistor (high impedance compared to 50 Ω), Figure 11.
 Figure 11. Wilder Fixture schematics.
Figure 11. Wilder Fixture schematics.The pick-off tee divides the voltage at the resistors, resulting in attenuation of 20.8 dB (a factor of 11). To counteract the loss, the fixture is equipped with an amplifier. By using an amplifier with frequency-dependent gain (higher amplification for 40 to 200 MHz and lower for 200 to 4000 MHz) we also achieve the second goal: amplification of the lower frequency FT harmonics relative to higher frequencies.
 Figure 12. Amplifier Gali-74+ allows good quality in time domain and minimal discretization error in frequency domain.
Figure 12. Amplifier Gali-74+ allows good quality in time domain and minimal discretization error in frequency domain. De-embedding the Test Fixture
The additional fixture must be accounted for in the calibration of the stressed signal at the desired Test point. If the test fixture limits the bandwidth, the resultant signal at the receiver will be distorted. However, if the fixture is accurately characterized through measurement or modelling (ideally both), it is possible to remove, or de-embed, the effects of the fixture and/or cables from the measurement.
 Figure 13. Block diagram illustrating steps required to generate a PDS defined waveform with the channel and/or fixture characteristics de-embedded.
Figure 13. Block diagram illustrating steps required to generate a PDS defined waveform with the channel and/or fixture characteristics de-embedded. Stressed Signal Calibration
To generate a receiver test stimulus within the specified tolerances of a worst-case transmitter and channel, precise calibration of the signal and all of its components is necessary. Figure 14 shows a calibration test setup. The impaired signal is analyzed by an oscilloscope which plays the role of reference receiver. After signal calibration, the DUT replaces the oscilloscope and the stressed receiver tolerance test can be performed. How a calibration can be defined and which type of signal (data, noise, both) can be calibrated depends heavily on the test Strategy A or B.
A full calibration (data and impairments) is only be possible with Strategy A, since a generator like BERT or AWG provides granular control of the signal and most impairments. Channel effects can also be "embedded or de-embedded" in the generated signal to make them calibration independent.
Using Strategy B would require stricter channel definitions and provisions in the test specifications to ‘qualify’ transmitters, cables, and additional fixtures as part of the test setup.
 Figure 14. Calibrations using Rx test strategies. In both cases only the dashed signal paths can be reliably calibrated. Strategy B relies on the upper half of the of the signal path to be defined as part of the testing channel. Only the injected impairments can be calibrated. Whereas Strategy A can incorporate the channel characteristics within the generated waveform to transmitted calibrated data and impairments.
Figure 14. Calibrations using Rx test strategies. In both cases only the dashed signal paths can be reliably calibrated. Strategy B relies on the upper half of the of the signal path to be defined as part of the testing channel. Only the injected impairments can be calibrated. Whereas Strategy A can incorporate the channel characteristics within the generated waveform to transmitted calibrated data and impairments.Calibration of Signals Defined by their Spectra
Calibrating a signal that has been defined by its PSD can be complicated. Not only do we have to calibrate the spectrum, we have to de-embed the channel through which it propagates.
Let
N(f) = the broadband random noise PSD
C(f) = the channel response, effectively a filter
If we transmit the broadband noise, N(f), through the channel, C(f), the filtered output is given by

Both N(f) and R(f) can be measured with a spectrum analyzer or with the FFT feature of an oscilloscope.
We can de-embed the channel by applying the inverse of the channel response, C(f)-1, to the sampled waveform prior to loading it into the AWG memory. This way, rather than transmitting broadband noise, N(f), we transmit T(f), the product of the inverse filter and the broadband noise,

The output from the channel is then,

effectively de-embedding the channel. In practice, we incorporate the frequency dependence of C(f)-1 in the FIR filter coefficients and tune the AWG voltage level to correct for channel loss.
Since measurements of broadband noise, N(f), R(f), and Rcal(f), are sequences of random values, we calculate the gross loss by using a running mean with a reasonably short averaging window.
Adjustments then can be made to the AWG output amplifier amplitude to achieve the desired noise power. For example, if we desire the mean broadband white noise, N(f) = -60 dBm, we generate white noise with a random number generator, de-embed the fixture, and measure the spectrum. If the measurement gives, say, R(f) = -66 dBm, we can simply adjust the AWG amplitude by R(f) - N(f) = -6 dB.
 Figure 15. Block diagram representing the steps to achieve a PSD calibrated noise waveform.
Figure 15. Block diagram representing the steps to achieve a PSD calibrated noise waveform.Calibration of RF and Fast Transient Signals
RF and fast transient calibrations are comparatively straightforward.
In order to generate an RF signal, V(f), we use

where, L(f) is the channel and/or fixture loss as a function of frequency, P(f) is the measured PSD, and Vinit is the initial AWG amplitude setting.
After setting Vinit, we measure the amplitude of the transmitted signal at the channel output with an oscilloscope to get Vmeas, to get the calibration constant, c,

and then determine the calibrated AWG amplitude for the RF signal at the desired frequency from the initial AWG amplitude,

Fast transient noise is calibrated with a simple iterative binary search:
- Measure the first few peaks of the Fast Transient, Figure 16
- Adjust the AWG amplitude
- Repeat until the output signal matches the requirement
A similar approach can be used to calibrate the frequency for RF and fast transients. To calibrate frequencies, instead of fine-tuning the AWG parameters, we fine-tune the calculation of the waveform and how it’s sampled. Figure 16 shows a calibrated fast transient waveform as defined by the MIPI A-PHY specification (Equation 3).
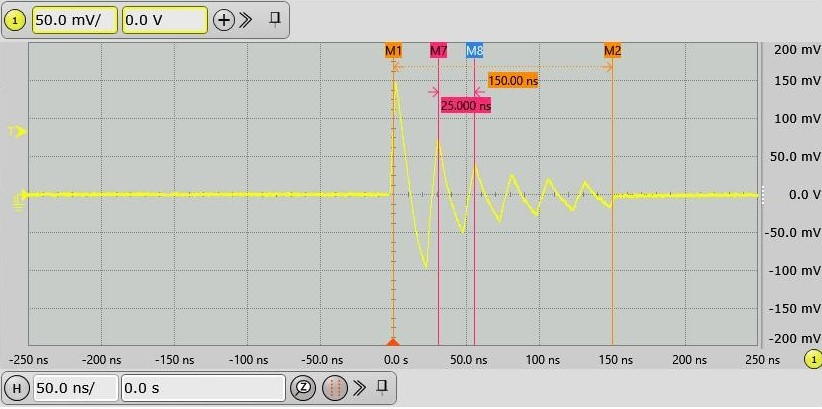 Figure 16. A calibrated fast transient noise waveform. The waveform is calibrated at transient frequency of 40 MHz (25 ns period between transients), a maximum duration of 150 ns and a peak of 150 mV.
Figure 16. A calibrated fast transient noise waveform. The waveform is calibrated at transient frequency of 40 MHz (25 ns period between transients), a maximum duration of 150 ns and a peak of 150 mV.Conclusion
As automotive SerDes standards and their specifications mature and are adopted, new solutions are required to facilitate rigorous receiver compliance testing. As the automotive industry advances to levels 4 and 5 autonomous driving, the stakes for reliable and safe SerDes function couldn’t be higher. The complicated automotive noise environment and asymmetric signaling challenges test engineers to develop effective compliance test methods. Choosing the right test strategy is a balance between adding complexity to the receiver to support test modes and ensuring a fully compliant and robust test.
The automotive SerDes transceiver has a multitude of responsibilities communicating critical sensor and display data to providing in-vehicle entertainment streams; all the while being under the noise introduced within an automotive. As far as the authors are aware, automotive standards are the only standards that require such a unique combination of noise profiles. Faithful generation of these impairments is another challenge for test engineers. Developing methods for to overcome these challenges will be a key to enable receiver testing that helps the automotive industry build better and reliable IVNs.
In this paper, the authors have presented methods for generating compliant noise signals with an AWG, and discussed the difficulties that must be addressed in the design of a compliant receiver test solution. A future with automotive SerDes is fast approaching and it is imperative that the test engineers are ready with solutions for unique challenges within the automotive environment.
REFERENCES
- MIPI Alliance, "MIPI Alliance Releases A-PHY SerDes Interface for Automotive," 15 09 2020, https://www.mipi.org/press-releases/mipi-alliance-releases-a-phy-serdes-interface-for-automotive.
- MIPI Alliance, "IEEE Adopts MIPI A-PHY, First Industry-Standard, Long-Reach SerDes Physical Layer Interface for Automotive Applications," July 13, 2021, https://www.mipi.org/press-releases/ieee-adopts-mipi-a-phy.
- MIPI Alliance, "MIPI Alliance Releases A-PHY v1.1, Doubling Maximum Data Rate and Adding New Implementation Options to Automotive SerDes Interface," January 18, 2022, https://www.mipi.org/press-releases/mipi-a-phy-v1-1-doubles-maximum-data-rate-and-adds-new-implementation-options.
- ASA, "About ASA," https://auto-serdes.org/about-us/.
- BOG/CAG - Corporate Advisory Group, "IEEE Standard for Adoption of MIPI Alliance Specification for A-PHY Interface (A-PHY) Version 1.0," IEEE, 2021.
- K. Matheus and M. Kaindl, "Automotive SerDes Technologies," in Automotive High Speed Communication Technologies: SerDes and Ethernet for Sensor and Display Applications, Hanser, 2022, pp. 199-245.
- ISO, "IEEE Standard for Adoption of MIPI Alliance Specification for A-PHY Interface (A-PHY) Version 1.0," ISO, 2020.
- ISO, "IEEE Standard for Adoption of MIPI Alliance Specification for A-PHY Interface (A-PHY) Version 1.0," ISO, 2019.
- ISO, "ISO 7637-2:2011 Road vehicles — Electrical disturbances from conduction and coupling — Part 2: Electrical transient conduction along supply lines only," ISO, 2011.
- ISO, "ISO 7637-3:2016 Road vehicles — Electrical disturbances from conduction and coupling — Part 3: Electrical transient transmission by capacitive and inductive coupling via lines other than supply lines," ISO, 2016.
- D. A. Stefan Buntz, "Common Mode Noise on an Automotive dataLine," March 13, 2018, https://www.ieee802.org/3/bp/public/mar13/buntz_3bp_01_0313.pdf.
- W. Köbele and e. al., "Challenges of Automated Stressed Receiver Tolerance Testing: NRZ, PAM4 & Beyond," DesignCon, 2022.
- J. Henaut and K. Kershner, "Challenges & Solutions in Physical Layer Testing for Automotive Wired Communications," DesignCon, 2022.
- “FFT Spectrum and Spectral Densities – Same Data, Different Scaling,” https://www.ap.com/blog/fft-spectrum-and-spectral-densities-same-data-different-scaling/.
- R. Mancini and B. Carter, in Op Amps for Everyone. Texas Instruments., 2009, pp. 10-11.
- "White Noise : Simulation and Analysis using Matlab," https://www.gaussianwaves.com/2013/11/simulation-and-analysis-of-white-noise-in-matlab/#:~:text=White%20Gaussian%20Noise%20can%20be,that%20follows%20a%20uniform%20distribution..
- A. Unakafov and e. al., "Applications of High Bandwidth AWGs in Receiver Testing: Tricks of the Trade," DesignCon, 2022.
- Keysight Technologies, "Keysight Fundamentals of Arbitrary Waveform Generation A high performance AWG primer," https://www.keysight.com/us/en/assets/9018-03815/reference-guides/9018-03815.pdf.